随着技术的发展,各种各样的跟踪测量传感技术也将日益成熟,如焊接技术,人们开始研究以焊缝的测量信息为反馈,由计算机控制焊接机器人进行焊接路径的自主示教技术。
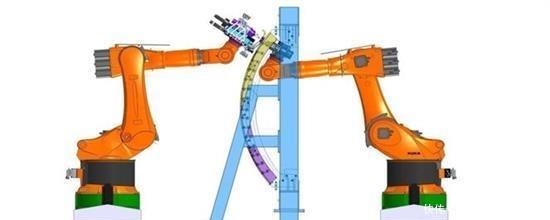
基于激光结构光的自主编程,结构光的路径自主规划的原理是将结构光传感器安装在工业机器人的末端,形成“眼在手上”的一种工作方式,利用焊缝跟踪技术逐点测量焊缝的中心坐标,通过建立起焊缝轨迹数据库,就可以在焊接时作为焊枪的路径。

基于双目视觉的自主编程的视觉反馈的自主示教,是实现工业机器人路径自主规划的一种关键技术,这项技术的主要原理是:在一定条件下,由主控计算机通过视觉传感器沿焊缝自动跟踪、采集并识别焊缝图像,计算出焊缝的空间轨迹和方位(即位姿),并按优化焊接要求自动生成机器人焊枪(Torch)的位姿参数。

工业机器人的编程技术一直是技术人员最关注的关键技术,无论是正在学习工业机器人还是已经在这个行业中发展的人来说。工业机器人的各项技术都需要我们常常进行学习,不断进步,这样才能成为工业机器人方面的高级人才。
 电话
电话 邮箱
邮箱 北京市房山区良乡凯旋大街建设路18号-D4857
北京市房山区良乡凯旋大街建设路18号-D4857