直线驱动组织
1. 齿轮齿条设备
一般,齿条是固定不动的,当齿轮传动时, 齿轮轴连同拖板沿齿条方向做直线运动, 这样, 齿轮的旋转运动就变换成为拖板的直线运动, 如图2.70所示。拖板是由导杆或导轨支承的。 该设备的回差较大。

图 2.70 齿轮齿条设备
2. 一般丝杠
一般丝杠驱动是由一个旋转的精细丝杠驱动一个螺母沿丝杠轴向移动。 因为一般丝杠的冲突力较大, 功率低, 惯性大, 在低速时简略发作匍匐现象, 并且精度低, 回差大, 因而在机器人上很少选用。
3. 滚珠丝杠
在机器人上经常选用滚珠丝杠, 这是因为滚珠丝杠的冲突力很小且运动呼应速度快。因为滚珠丝杠在丝杠螺母的螺旋槽里放置了许多滚珠,传动进程中所受的冲突力是滚动冲突, 可极大地减小冲突力,因而传动功率高,消除了低速运动时的匍匐现象。在装置时施加必定的预紧力,可消除回差。
如图2.71所示, 滚珠丝杠里的滚珠从钢套管中出来, 进入经过研磨的导槽, 滚动2~3圈今后, 回来钢套管。 滚珠丝杠的传动功率能够到达90%, 所以只需求运用极小的驱动力, 并选用较小的驱动连接件就能够传递运动。
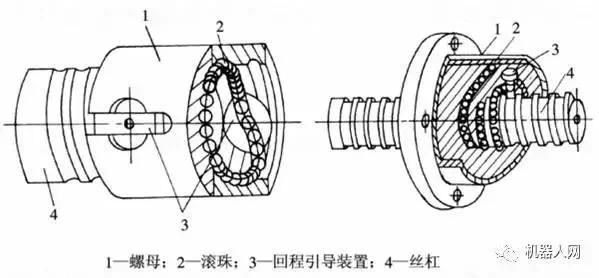
图 2.71 滚球丝杠副
2.5.2 旋转驱动组织
1. 齿轮链
齿轮链是由两个或两个以上的齿轮组成的传动组织。它不但能够传递运动角位移和角速度, 并且能够传递力和力矩。 现以具有两个齿轮的齿轮链为例, 阐明其传动变换联系。其间一个齿轮装在输入轴上, 另一个齿轮装在输出轴上, 如图2.72所示。
图 2.72 齿轮链组织
运用齿轮链组织应留意两个问题:
一是齿轮链的引进会改动体系的等效滚动惯量, 然后使驱动电机的呼应时刻减小, 这样伺服体系就愈加简略操控。输出轴滚动惯量变换到驱动电机上, 等效滚动惯量的下降与输入输出齿轮齿数的平方成正比。
二是在引进齿轮链的一起, 因为齿轮空隙差错, 将会导致机器人手臂的定位差错添加; 并且, 假设不采纳一些补救措施, 齿隙差错还会引起伺服体系的不稳定性。
一般, 齿轮链滚动有以下几种类型, 如图2.73所示。
其间圆柱齿轮的传动功率约为90%, 因为结构简略, 传动功率高,圆柱齿轮在机器人规划中最常见;
斜齿轮传动功率约为80%, 斜齿轮能够改动输出轴方向; 锥齿轮传动功率约为70%, 锥齿轮能够使输入轴与输出轴不在同一个平面, 传动功率低; 蜗轮蜗杆传动功率约为70%,蜗轮蜗杆组织的传动比大, 传动平稳, 可完成自锁, 但传动功率低, 制造本钱高, 需求光滑; 行星轮系传动功率约为80%,传动比大, 但结构杂乱。
图 2.73 常用的齿轮链
(a) 圆柱齿轮; (b) 斜齿轮; (c) 锥齿轮; (d) 蜗轮蜗杆; (e) 行星轮系
2. 同步皮带
同步皮带类似于工厂的风扇皮带和其他传动皮带, 所不同的是这种皮带上具有许多型齿, 它们和相同具有型齿的同步皮带轮齿相啮合。
作业时, 它们相当于柔软的齿轮, 具有柔性好, 价格便宜两大长处。别的, 同步皮带还被用于输入轴和输出轴方向不一致的状况。
这时, 只需同步皮带满足长,使皮带的扭角差错不太大, 则同步皮带仍能够正常作业。在伺服体系中, 假设输出轴的方位选用码盘丈量, 则输入传动的同步皮带能够放在伺服环外面, 这对体系的定位精度和重复性不会有影响, 重复精度能够到达1 mm以内。 此外, 同步皮带比齿轮链价格低得多, 加工也简略得多。 有时, 齿轮链和同步皮带结合起来运用更为便利。
3. 谐波齿轮
尽管谐波齿轮已面世多年, 但直到最近人们才开端广泛地运用它。现在, 机器人的旋转关节有60%~70%都运用谐波齿轮。
谐波齿轮传动组织由刚性齿轮、 谐波发作器和柔性齿轮三个首要零件组成, 如图2.74所示。 作业时, 刚性齿轮固定设备, 各齿均布于圆周, 具有外齿形的柔性齿轮沿刚性齿轮的内齿滚动。
柔性齿轮比刚性齿轮少两个齿, 所以柔性齿轮沿刚性齿轮每转一圈就反方向转过两个齿的相应转角。 谐波发作器具有椭圆形概括, 装在谐波发作器上的滚珠用于支承柔性齿轮, 谐波发作器驱动柔性齿轮旋转并使之发作塑性形。滚动时, 柔性齿轮的椭圆形端部只要少量齿与刚性齿轮啮合, 只要这样, 柔性齿轮才干相对于刚性齿轮自由地转过必定的视点。
假定刚性齿轮有100个齿, 柔性齿轮比它少2个齿, 则当谐波发作器转50圈时, 柔性齿轮转1圈, 这样只占用很小的空间就可得到1∶50的减速比。
因为一起啮合的齿数较多, 因而谐波发作器的力矩传递才干很强。在3个零件中, 尽管任何2个都能够选为输入元件和输出元件, 但一般总是把谐波发作器装在输入轴上, 把柔性齿轮装在输出轴上, 以取得较大的齿轮减速比。
图 2.74 谐波齿轮传动
直线驱动和旋转驱动的选用和制动
1. 驱动办法的选用
在廉价的核算机面世以前, 操控旋转运动的首要困难之一是核算量大, 所以, 其时以为选用直线驱动办法比较好。 直流伺服电机是一种较抱负的旋转驱动元件, 但需求经过较贵重的伺服功率放大器来进行精确的操控。例如,在1970年,尚没有牢靠的大功率晶体管, 需求用许多大功率晶体管并联, 才干驱动一台大功率的伺服电机。
今日, 电机驱动和操控的费用现已大大地下降, 大功率晶体管现已广泛运用, 只需选用几个晶体管就能够驱动一台大功率伺服电机。相同, 微型核算机的价格也越来越便宜,核算机费用在机器人总费用中所占的份额大大下降,有些机器人在每个关节或自由度中都选用一个微处理器。
因为上述原因,许多机器人公司在制造和规划新机器人时, 都选用了旋转关节。但是也有许多状况选用直线驱动更为适宜, 因而,直线气缸仍是现在一切驱动设备中最廉价的动力源, 凡能够运用直线气缸的当地, 仍是应该选用它。别的,有些要求精度高的当地也要选用直线驱动。
2. 制动器
许多机器人的机械臂都需求在各关节处设备制动器, 其效果是: 在机器人中止作业时, 坚持机械臂的方位不变; 在电源发作毛病时, 保护机械臂和它周围的物体不发作磕碰。
假设齿轮链、谐波齿轮组织和滚珠丝杠等元件的质量较高,一般其冲突力都很小, 在驱动器中止作业的时分, 它们是不能接受负载的。假设不选用某种外部固定设备, 如制动器、夹紧器或止挡设备等,一旦电源封闭, 机器人的各个部件就会在重力的效果下滑落。因而, 为机器人规划制动设备是十分必要的。
制动器一般是按失效抱闸办法作业的, 即要松开制动器就必须接通电源, 不然, 各关节不能发作相对运动。
这种办法的首要意图是在电源出现毛病时起保护效果, 其缺陷是在作业期间要不断通电使制动器松开。
假设需求的话, 也能够选用一种省电的办法, 其原理是: 需求各关节运动时, 先接通电源, 松开制动器, 然后接通另一电源, 驱动一个挡销将制动器锁在放松状况。 这样, 所需求的电力仅仅是把挡销放到位所花费的电力。
为了使关节定位精确, 制动器必须有满足的定位精度。制动器应当尽可能地放在体系的驱动输入端, 这样使用传动链速比, 能够减小制动器的细微滑动所引起的体系振荡, 确保在承载条件下仍具有较高的定位精度。在许多实践使用中, 许多机器人都选用了制动器。
图2.75为三菱装置机器人Movemaster EX RV-M1的肩部制动闸设备图。图 2.75 三菱装置机器人肩部制动闸设备图
工业机器人的传动
工业机器人的传动设备与一般机械的传动设备的选用和核算大致相同。 但工业机器人的传动体系要求结构紧凑、 重量轻、滚动惯量和体积小, 要求消除传动空隙, 进步其运动和方位精度。工业机器人传动设备除齿轮传动、蜗杆传动、 链传动和行星齿轮传动外, 还常用滚珠丝杆、 谐波齿轮、钢带、 同步齿形带和绳轮传动。表2.1为工业机器人常用传动办法的比较与剖析。
表2.1 工业机器人常用传动办法的比较与剖析
新式的驱动办法
1. 磁致弹性驱动
铁磁资料和亚铁磁资料因为磁化状况的改动, 其长度和体积都要发作细小的改动, 这种现象称为磁致弹性。
20世纪60年代发现某些稀土元素在低温时磁伸率达3000×10-6~10 000×10-6,人们开端重视研讨有适用价值的大磁致弹性资料。
研讨发现,TbFe2(铽铁)、SmFe2(钐铁)、DyFe2(镝铁)、 HoFe2(钬铁)、TbDyFe2(铽镝铁)等稀土-铁系化合物不只磁致弹性值高, 并且居里点高于室温, 室温磁致弹性值为1000×10-6~2500×10-6, 是传统磁致弹性资料如铁、镍等的10~100倍。 这类资料被称为稀土超磁致弹性资料(Rear Earth Giant MagnetoStrictive Materials, 缩写为RE-GMSM)。
这一现象已用于制造具有微英寸量级位移才干的直线电机。为使这种驱动器作业, 要将被磁性线圈掩盖的磁致弹性小棒的两头固定在两个架子上。当磁场改动时, 会导致小棒缩短或扩展, 这样其间一个架子就会相对于另一个架子发作运动。一个与此类似的概念是用压电晶体来制造具有毫微英寸量级位移的直线电机。
美国波士顿大学现已研制出了一台运用压电微电机驱动的机器人——“机器蚂蚁”。 “机器蚂蚁”的每条腿是长1 mm或不到1 mm的硅杆, 经过不带传动设备的压电微电机来驱动各条腿运动。这种“机器蚂蚁”可用在实验室中收集放射性的尘埃以及从活着的病人体中收取患病的细胞。
2. 形状回忆金属
有一种特别的形状回忆合金叫做Biometal(生物金属), 它是一种专利合金, 在到达特定温度时缩短大约4%。 经过改动合金的成分能够规划合金的改变温度, 但规范样品都将温度设在90℃左右。
在这个温度邻近, 合金的晶格结构会从马氏体状况改动到奥氏体状况,并因而变短。但是,与许多其他形状回忆合金不同的是,它变冷时能再次回到马氏体状况。假设线材上负载低的话,上述进程能够继续改动数十万个循环。
完成这种改变的常用热源来自于当电流经过金属时,金属因自身的电阻而发作的热量。结果是,来自电池或许其他电源的电流容易就能使生物金属线缩短。
这种线的首要缺陷在于它的总应变仅发作在一个很小的温度范围内,因而除了在开关状况下以外, 要精确操控它的拉力很困难,一起也很难操控位移。
图 2.76 形状回忆金属制造的结尾操作器
3. 静电驱动器
图2.77是一个带有电阻器移动子的三相静电驱动器的作业原理图。
图 2.77 三相静电驱动器作业原理
这种执行器有下列特征:
(1) 因为移动子中没有电极, 所以不用断定与定子的相对方位, 定子电极的距离能够非常小。
(2) 因为驱动时会发作浮力,所以冲突力小,在中止时因为存在着吸引力和冲突力, 因而能够取得比较大的坚持力。
(3) 因为结构简略, 所以能够完成以薄膜为基础的大面积多层化结构。
根据上述各点, 把这种执行器作为完成人工筋肉的一种办法, 受到了人们的重视。
4. 超声波电机
超声波电机的作业原理是用超声波鼓励弹性体定子,使其表面构成椭圆运动, 因为其上与转子(或滑块)触摸, 在冲突的效果下转子取得推力输出。如图2.78所示, 能够以为定子依照角频率ω0,进行超声波振荡, 在预压W效果下, 转子被推进。
超声波电机的负载特性与DC电机类似, 相对于负载添加, 转速有笔直下降的趋势,将超声波电机与DC电机进行比较, 它的特色有: ① 可望到达低速、 高功率; ② 相同的尺度, 能得到大的转矩; ③ 能坚持大转矩; ④ 无电磁噪声; ⑤ 易操控; ⑤ 外形的自由度大等。
图 2.78 超声波电机的作业原理图2.5.6 驱动传动办法的使用 1. Movemaster EX RV-M1的驱动传动
图2.79为三菱装置机器人Movemaster EX RV-M1的驱动传动简图。
该机器人选用电动办法驱动, 有5个自由度, 分别为腰部旋转、肩部旋转、肘部的滚动、手腕的俯仰与翻转。各关节均由直流伺服电机驱动,其间,腰部旋转部分与腕关节的翻转为直接驱动。为了减小惯性矩,肩关节、肘关节和腕关节的俯仰都选用同步带传动。实验室常用的结尾操作器(在零件装置时有开闭动作)选用直流电机驱动。
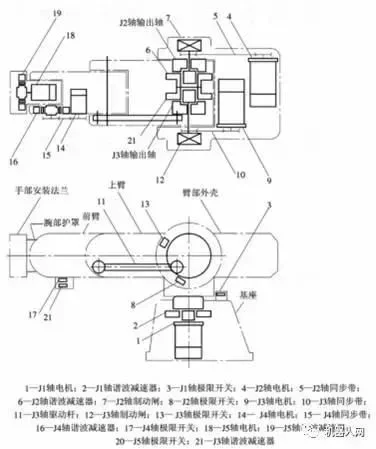
图 2.79 三菱装置机器人内部结构简图
1) 腰部滚动(J1轴)
(1) 腰部(J1轴)由基座内的电机①和调谐齿轮②驱动。
(2) J1轴限位(极限)开关③装在基座顶部。
2) 肩部(J2轴)旋转
(1) 肩部(J2轴)由肩关节处的调谐齿轮⑥驱动, 由连接在J2轴电机④上的同步带⑤带动旋转。
(2) 电磁制动闸⑦装在调谐齿轮⑥的输入轴上, 以防止断电时肩部因为自重而下转。
(3) J2轴限位开关⑧装在肩壳内上臂处。
3) 肘部扩展(J3轴)
(1) J3轴电机⑨的滚动由同步带B10传送至调谐齿轮B21。
(2) 调谐齿轮B21上J3轴输出轴的滚动由J3轴的驱动连杆传送至肘部的轴上,然后带动前臂扩展。
(3) 电磁制动闸B12装在调谐齿轮B21的输入轴上。
(4) J3轴限位开关B13设备在肩壳内上臂处。
4) 腕部俯仰(J4轴)
(1) J4轴的电机B14设备在前臂内。J4轴同步带B15将该电机的滚动传送到调谐齿轮B16上,然后带动腕壳旋转。
(2) J4轴的限位开关B17设备在前臂下侧。
5) 腕部滚动(J5轴)
(1) J5轴电机B18和J5轴调谐齿轮B19设备在腕壳内的同一轴上, 由它们带动手爪设备法兰旋转。
(2) J5轴的限位开关B20设备在前臂下。
2. PUMA 562机器人传动
图2.80为PUMA 562机器人的外形图。 该机器人有6个自由度, 其传动办法如图2.80所示。由图可看出:
电机1经过两对齿轮Z1、 Z2、 Z3、 Z4传动带动立柱反转。
电机2经过联轴器、 一对圆锥齿轮Z5、 Z6和一对圆柱齿轮Z7、 Z8带动齿轮Z9, 齿轮Z9绕与立柱固联的齿轮Z10滚动, 于是构成了大臂相对于立柱的反转。
电机3经过两个联轴器和一对圆锥齿轮Z1、 Z2、 两对圆柱齿轮Z13、 Z14, Z15、 Z16(Z16固联于小臂上)驱动小臂相对于大臂反转。
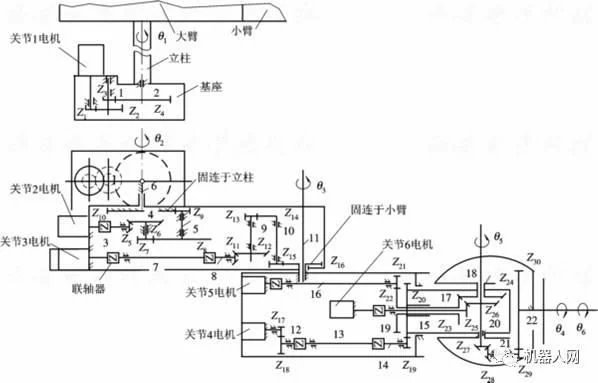
图 2.79 PUMA 562机器人的传动示意图
电机4先经过一对圆柱齿轮Z17、 Z18、 两个联轴器和另一对圆柱齿轮Z19、Z20(Z20固联于手腕的套筒上)驱动手腕相对于小臂反转。
电机5经过联轴器、 一对圆柱齿轮Z21、 Z22、一对圆锥齿轮Z23、 Z24(Z24固联于手腕的球壳上)驱动手腕相对于小臂(亦即相对于手腕的套筒)摇摆。
电机6经过联轴器、 两对圆锥齿轮Z25、 Z26, Z27、 Z28和一对圆柱齿轮Z29、 Z30驱动机器人的机械接口(法兰盘)相对于手腕的球壳反转。
 电话
电话 邮箱
邮箱 北京市房山区良乡凯旋大街建设路18号-D4857
北京市房山区良乡凯旋大街建设路18号-D4857